
Building a Chess-Playing Robotic Arm
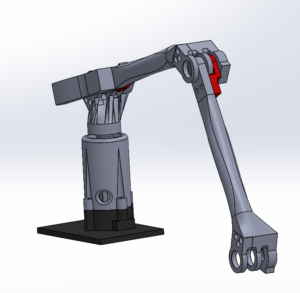 At FabLab Nepal, Sanjeev Lamichhane, our Technical Assistant, has been developing a chess-playing robotic arm, designing and building the system from the ground up. He has been directly involved in the full developmental process, including conceptualization, 3D modeling, fabrication, assembly, and programming. The components were modeled using CAD software (SolidWorks), fabricated through 3D printing, and assembled into a functional mechanism. The hardware is largely complete, and the arm can already be operated both manually and through basic programmed control.
At FabLab Nepal, Sanjeev Lamichhane, our Technical Assistant, has been developing a chess-playing robotic arm, designing and building the system from the ground up. He has been directly involved in the full developmental process, including conceptualization, 3D modeling, fabrication, assembly, and programming. The components were modeled using CAD software (SolidWorks), fabricated through 3D printing, and assembled into a functional mechanism. The hardware is largely complete, and the arm can already be operated both manually and through basic programmed control.
Chess provides a structured and meaningful task for the system. Each move requires the arm to position itself accurately, grasp a piece with care, and place it precisely without disturbing the board. This makes the project a practical way to explore controlled motion and precision, giving the robotic arm a clear purpose beyond demonstration.

The next phase of the work focuses on integrating computer vision. For the system to play autonomously, it must be able to interpret the board, identify pieces, and track changes after each move. Incorporating a camera and vision system will allow the robot to respond dynamically, rather than simply execute predefined instructions.
Robotic arms are widely used in applications that demand accuracy and consistency, such as manufacturing and assembly. Similarly, computer vision is increasingly essential in systems that must recognize and respond to their environment. This project brings these two elements together in a single, hands-on build, offering a direct understanding of how movement and perception can work in tandem.
At FabLab Nepal, the project also reflects the importance of making as a learning process. It combines design, fabrication, electronics, and programming into one cohesive effort, demonstrating how complex ideas become clearer through experimentation. While the chessboard serves as the immediate application, the same approach can extend to broader areas such as automation, object handling, and assistive technologies where machines interact more intelligently with the physical world.
For Sanjeev, this project has been a deeply practical learning experience. It showed him that building something real is very different from only designing it on screen; every stage brought small challenges that required patience, rethinking, and repeated testing. Working through those moments gave him a clearer understanding of how robotics comes together in practice.
Rethinking User Access Control: SRFID at FabLab Nepal

Every time someone taps their RFID (Radio Frequency Identification) card to enter a building, they place their trust in a system that most people have a very shallow understanding of. SecureRFID is a project currently under development here at Fablab Nepal by Arnav Maharjan, that aims to help create a more secure and accessible utilization and understanding of RFID technology here in Nepal.
Schools, universities, hospitals, and offices across Nepal have adopted RFID technology, yet most deployments leave it vulnerable to card cloning and unauthorized access. A card’s signal can be copied in seconds, and the reader cannot tell the difference. More secure hardware exists, but is not accessible enough for wide-scale deployment, which leaves most systems appearing fine on the surface, while being far easier to break than users realise.
SRFID addresses this by offering two approaches depending on the use case. For accessible, wide-scale deployment, the system ensures that even if a card is cloned, it cannot be reused multiple times. The credentials change with every interaction, making the copy single-use. For environments that need a higher level of security, the project explores cards that handle verification internally, removing the need to rely on external systems entirely, which is possible using NTAG 424 DNAs but are not widely available in Nepal.
The goal of SRFID is to clearly show the problem and what compromises need to be made to get to an accessible and secure solution. It is a starting point about how we build and implement the systems we use and trust every day. By pointing out the vulnerabilities and possible solutions, SRFID hopes to make institutions and organizations more aware of the technologies they use and how they choose to implement them.


